Trident: SAE Aero Design East (2022)
SAE Aero Design’22 Advanced Class RC Aircraft with a Wingspan of > 3m. It carries three Propelled Autonomoust Delivery Aircrafts externally and water as payload.

SAE Aero Design’22 Advanced Class RC Aircraft with a Wingspan of > 3m. It carries three Propelled Autonomoust Delivery Aircrafts externally and water as payload.
SAE Aero Design’21 Advanced Class RC Aircraft with a Wingspan of > 3m. It carries three Colonist Delivery Aircraft externally and supply payloads namely Aero Howlers and Water Bottles in the fuselage.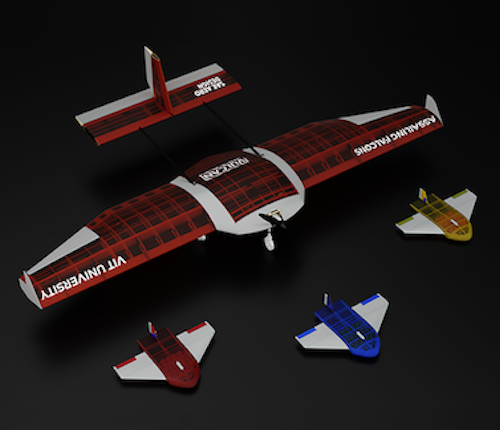
A Smart Automatic Contactless Temperature Checkup and Mask Detection Kiosk using Facial Landmarking and Deep Learning for under $100.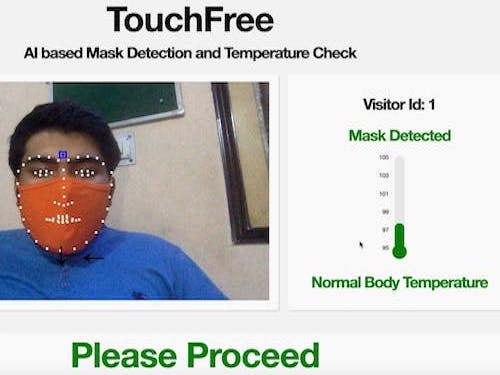
A Smart and Adaptive Driver Monitoring and Assistance System based on Facial Landmarking & Deep Learning.
High Powered Model Rocket developed during Winter Internship’19 at Avionics Lab, STAR, Surat, India.
Octopod, a uniquely shaped full automation system that allows you to monitor your industry and keep security with AI and smart RFID locks.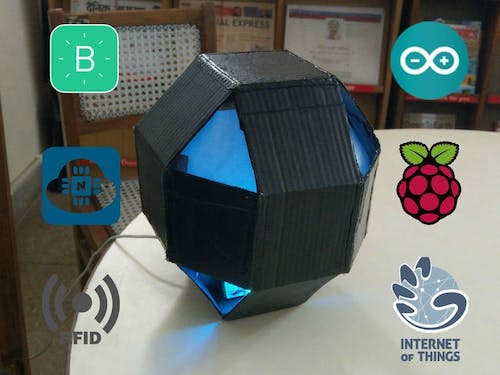
Published in Journal of Critical Review (Scopus Indexed), 2020
Agriculture is back bone of world’s economy and human life to survive. Agricultural Industry has more or less remained dependent on conventional methods of farming. The farming conditions have changed significantly over last few decades. Soil Fertility, Amount of Water for Irrigation and other resources have become scarcer but the global population has increased immensely. This calls in need for implementation of better farming methods like precision farming which increase the overall yield. In recent years there had a gradual increase in the usage of such systems. WSNs tell us about some problems like interoperability, communications, scalability and connectivity. The main aim for precision farming (PA) is to increase the farming production by concerning climate, water quality, terrain, weather and crop status. In recent years farmers are using information systems for the improvement of crop management and to increase productivity. This leads to create a platform for managing farm activities and to improve biodiversity and to reduce the usage of water. Such new invention should be made to enhance and develop the farming. This paper analyses and reveals how IoT can lay a strong foundation towards sustainable development in agriculture.
Recommended citation: Verma, P., Bhutani, S., Srividhya, S., Karthikeyan, D., & Tong, D. C. S. (2019). Review of internet of things towards sustainable development in agriculture. Journal of Critical Reviews, 7(3), 2020. http://sakshambhutani.xyz/files/Paper1.pdf
Published in Elsevier Expert Systems with Applications, 2023
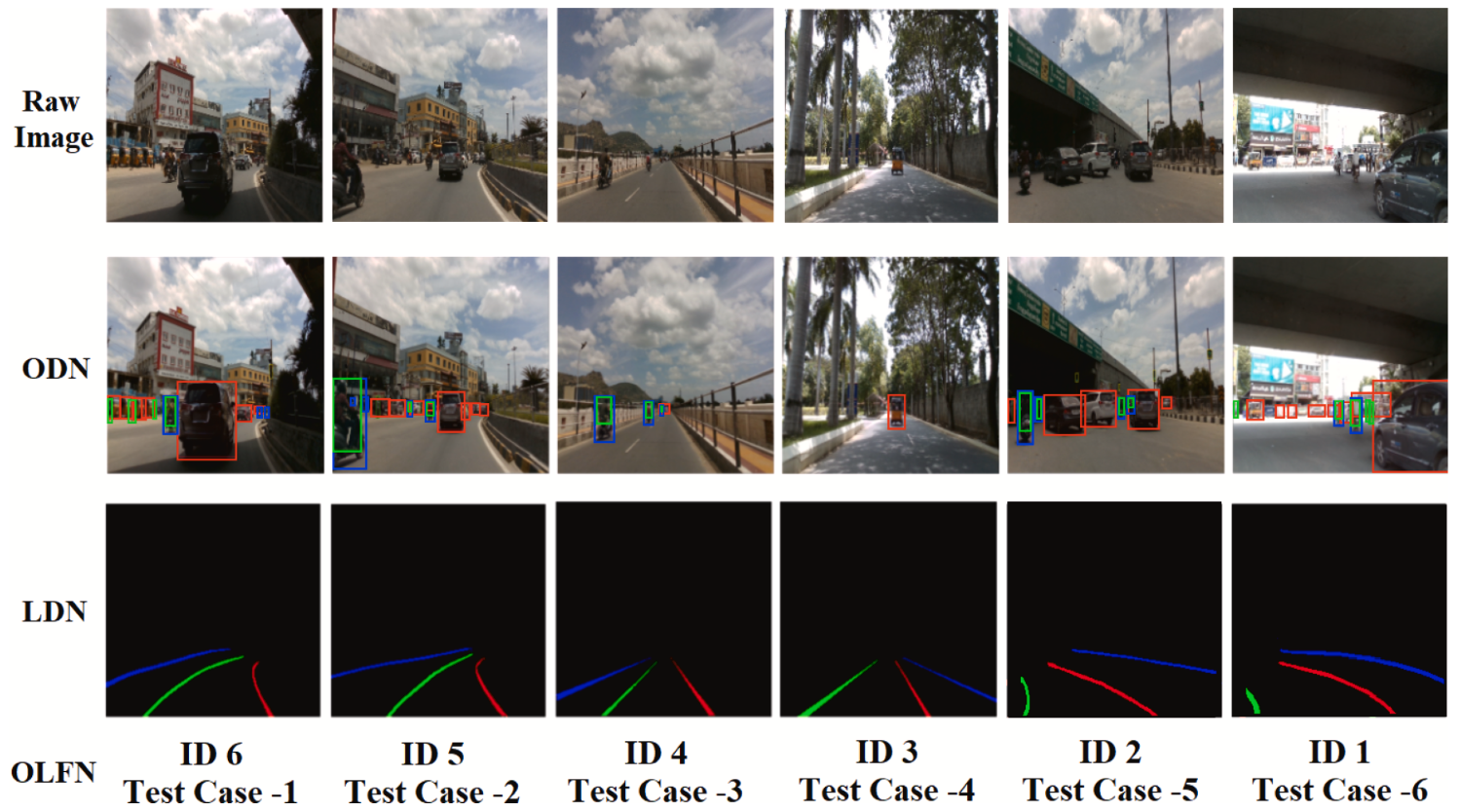
This paper proposes a deep-learning-based novel decision-making network named LaneScanNET to assist the ADS in lane-changing or lane-keeping decision-making. The proposed system assists ADS in detecting obstacles, localization of the Ego Vehicle (EGV) on roads, and estimating lane status in its Field of View (FOV). The proposed LaneScanNET uses a parallel pipeline with an Obstacle Detection Network (ODN) and a Lane Detection Network (LDN) to simultaneously process the incoming image frames for detecting obstacles and segmenting lane lines, respectively. Further, the Obstacle-Lane Fusion Network (OLFN) fuses these results to predict the status of the obstacle lane in the FOV of autonomous vehicles. Vellore Institute of Technology’s (VIT’s) real-time driving dataset on indigenous roads has been collected to train the proposed LaneScanNET with 2464 obstacle-lane images obtained by driving over 60 km. The dataset generated for obstacle detection and its corresponding lane detection has also been made publicly available to promote research work for these developing countries. The proposed system outperforms all existing networks on Indian roads with an accuracy of 75.28% in obstacle detection and 91.36% in lane detection. Additionally, the proposed system can analyze the lane status with an accuracy of 92.54%. The proposed network performs exceptionally well in unforeseen circumstances like shadows, fog, dust, and occlusions making LaneScanNET a robust network that can be an add-on for ADS to make lane-keeping or lane-changing decisions. The LaneScanNET can be integrated into real-time vehicles to assist drivers or ADS.
Recommended citation: Perumal, P. S., Wang, Y., Sujasree, M., Tulshain, S., Bhutani, S., Suriyah, M. K., & Raju, V. U. K. (2023). LaneScanNET: A Deep-Learning Approach for Simultaneous Detection of Obstacle-Lane States for Autonomous Driving Systems. Expert Systems with Applications, 120970. https://doi.org/10.1016/j.eswa.2023.120970