
LaneScanNET: A deep-learning approach for simultaneous detection of obstacle-lane states for autonomous driving systems.
Published in Elsevier Expert Systems with Applications, 2023
Recommended citation: Perumal, P. S., Wang, Y., Sujasree, M., Tulshain, S., Bhutani, S., Suriyah, M. K., & Raju, V. U. K. (2023). LaneScanNET: A Deep-Learning Approach for Simultaneous Detection of Obstacle-Lane States for Autonomous Driving Systems. Expert Systems with Applications, 120970. https://doi.org/10.1016/j.eswa.2023.120970
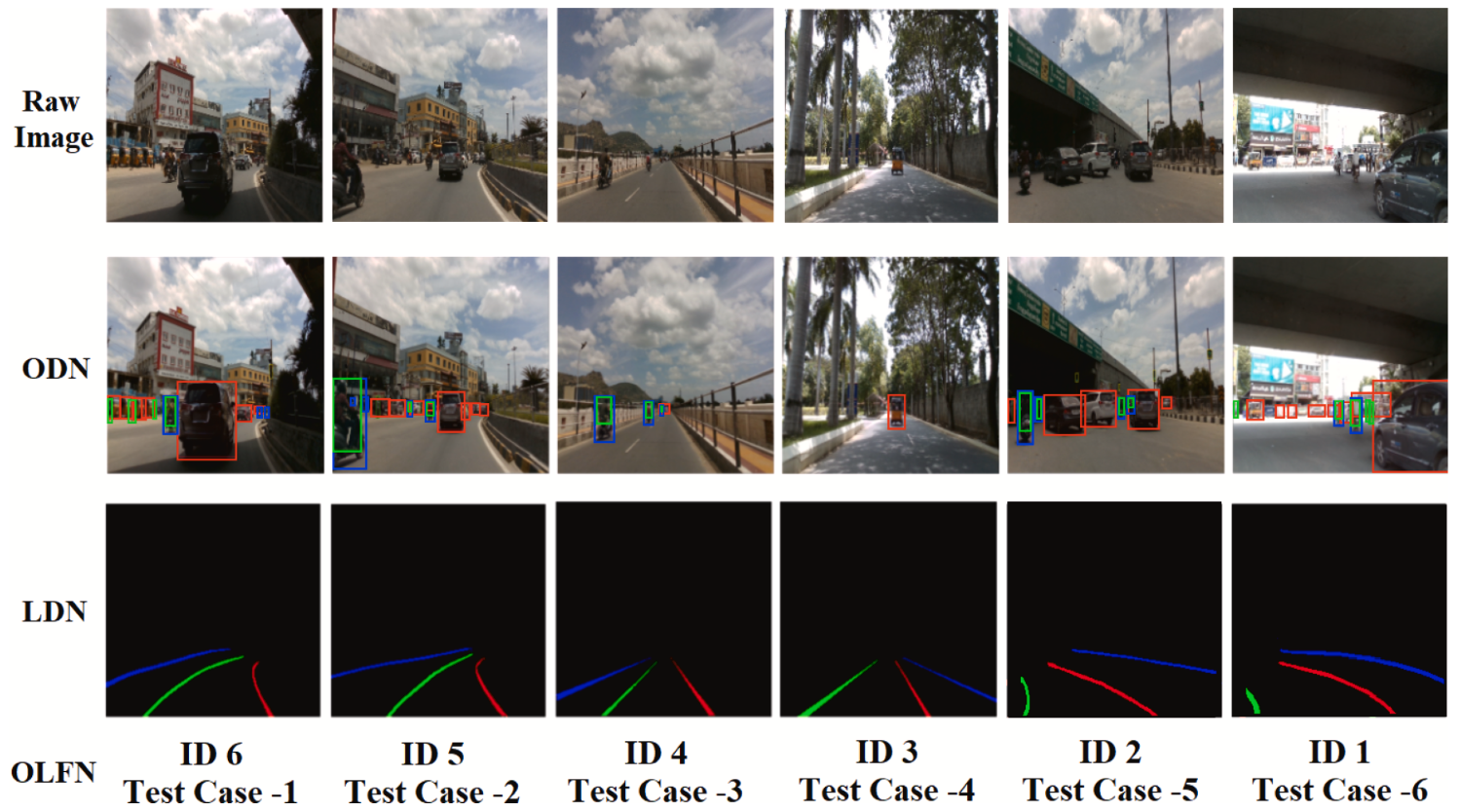
This paper proposes a deep-learning-based novel decision-making network named LaneScanNET to assist the ADS in lane-changing or lane-keeping decision-making. The proposed system assists ADS in detecting obstacles, localization of the Ego Vehicle (EGV) on roads, and estimating lane status in its Field of View (FOV). The proposed LaneScanNET uses a parallel pipeline with an Obstacle Detection Network (ODN) and a Lane Detection Network (LDN) to simultaneously process the incoming image frames for detecting obstacles and segmenting lane lines, respectively. Further, the Obstacle-Lane Fusion Network (OLFN) fuses these results to predict the status of the obstacle lane in the FOV of autonomous vehicles. Vellore Institute of Technology’s (VIT’s) real-time driving dataset on indigenous roads has been collected to train the proposed LaneScanNET with 2464 obstacle-lane images obtained by driving over 60 km. The dataset generated for obstacle detection and its corresponding lane detection has also been made publicly available to promote research work for these developing countries. The proposed system outperforms all existing networks on Indian roads with an accuracy of 75.28% in obstacle detection and 91.36% in lane detection. Additionally, the proposed system can analyze the lane status with an accuracy of 92.54%. The proposed network performs exceptionally well in unforeseen circumstances like shadows, fog, dust, and occlusions making LaneScanNET a robust network that can be an add-on for ADS to make lane-keeping or lane-changing decisions. The LaneScanNET can be integrated into real-time vehicles to assist drivers or ADS.
Recommended citation: ‘Perumal, P. S., Wang, Y., Sujasree, M., Tulshain, S., Bhutani, S., Suriyah, M. K., & Raju, V. U. K. (2023). LaneScanNET: A Deep-Learning Approach for Simultaneous Detection of Obstacle-Lane States for Autonomous Driving Systems. Expert Systems with Applications, 120970.’